Bem vindo à todos. Durante esse mini-curso vamos aprender tudo sobre o Arduino! Espero que todos gostem e possam aproveitar mais desta incrível plataforma. A programação deste mini-curso é a seguinte: Aula 1 - O que é Arduino? - Neste tópico mostraremos o que é Arduino, para que serve e qual é o seu propósito Aula 2 - O Hardware - Demonstraremos o hardware do Arduino, seus recursos, suas variações e seus usos. Aula 3 - O Ambiente de Desenvolvimento Integrado - Neste tópico abordaremos o software do Arduino, sua interface de desenvolvimento e suas configurações. Aula 4 - Construindo uma placa compatível com Arduino - Neste tópico ensinaremos a construir a sua própria placa de arduino, um X-Duino, clone de arduino que foi projetado para facilitar sua construção. Vamos nessa!! O que afinal é Arduino? Arduino é uma plataforma de prototipagem eletrônica, criado por Massimo Banzi e David Cuartielles em 2005 com objetivo de permitir o desenvolvimento de controle de sistemas interativos, de baixo custo e acessível a todos. O projeto foi criado pensando em artistas e amadores, ou seja, não é necessário ter conhecimentos prévios em eletrônica ou programação para iniciar-se no mundo Arduino. Com o Arduino é possível também enviar e receber informações de praticamente qualquer outro sistema eletrônico. Desta forma é possível contruir por exemplo, um sistema de captação de dados de sensores, como temperatura, iluminação, processar e enviar esses dados para um sistema remoto por exemplo. Outra característica importante é que todo material (software, bibliotecas, hardware) é open-source, ou seja, pode ser reproduzido e usado por todos sem a necessidade de pagamento de royalties ou direitos autorais. A plataforma é composta essencialmente de duas partes: O Hardware e o Software. O Hardware
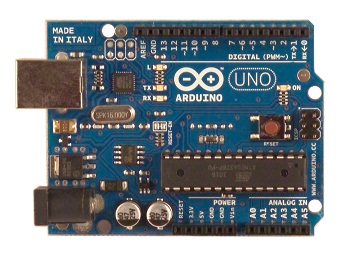
Placa Arduino Uno
Vamos abordar com detalhes o hardware do Arduino posteriormente. Resumidamente o hardware é uma placa eletrônica que:
Possui todos componentes necessários para a maioria dos projetos;
Contém uma eletrônica que permite usar a placa com diversas fontes de energia, baterias e fontes de alimentação;
Permite o acoplamento de circuitos externos através de pinos de conexão em posições padronizadas;
A eletrônica é baseada em componentes de fácil obtenção, inclusive no mercado brasileiro;
O esquema da placa é livre, e pode ser facilmente modificado ou adaptado.
A placa é programada, ou seja, escrevemos um software que ficará embutido no chip controlador (firmware)
O Software
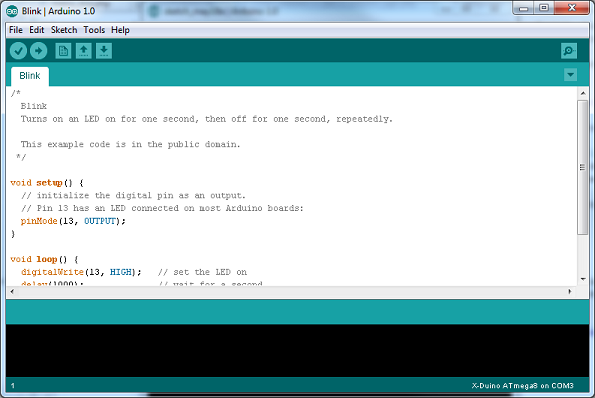
O Arduino é um compilador gcc (C e C++) baseado em Wiring e que usa uma interface gráfica contruída em Java baseado no projeto Processing. Tudo isso resume-se a um programa IDE (ambiente de desenvolvimento integrado) muito simples de usar e de estender com bibliotecas que podem ser facilmente encontradas na internet (aos montes).
Ambiente de desenvolvimento do Arduino
Depois de criar o programa e compilar usando a IDE, o código gerado é enviado para a placa onde é gravado dentro do chip controlador. Esse software que roda na placa chama-se FIRMWARE. As funções da IDE do Arduino são basicamente duas: Permitir o desenvolvimento de um software e enviá-lo à placa para que possa ser executado.
Construindo um protótipo
O processo de construção de um circuito de controle básico resume-se à:
Escrever um programa usando a interface de desenvolvimento do Arduino;
Conectar a placa do Arduino no computador através de um cabo (USB é o mais comum)
Compilar o programa escrito
Enviar o programa compilado para a placa e observar o funcionamento
Exemplo de aplicação: controle de servo motores (fonte: Fritzing)
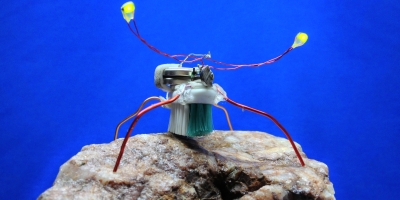
Em resumo, a plataforma arduino permite criar coisas que possuem funções eletrônicas e mecânicas de forma fácil e sem precisar ser engenheiro. Abaixo segue um exemplo de um brinquedo que fiz em 2011 usando a placa que aprenderemos fazer neste curso. Um amigo estava jogando um jogo que consistia em colocar uma bolinha no centro de um labirinto. Esta foi a idéia que eu precisava e o resultado do brinquedo vocês conferem abaixo. Continuem acompanhando nosso curso! Em breve teremos a próxima aula. Até lá!!
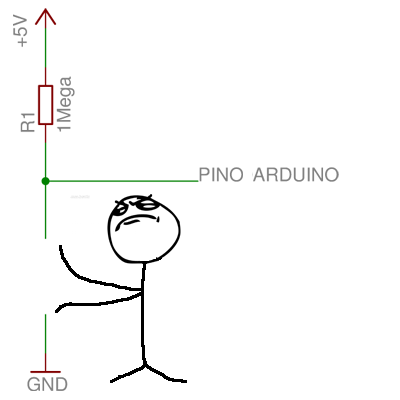
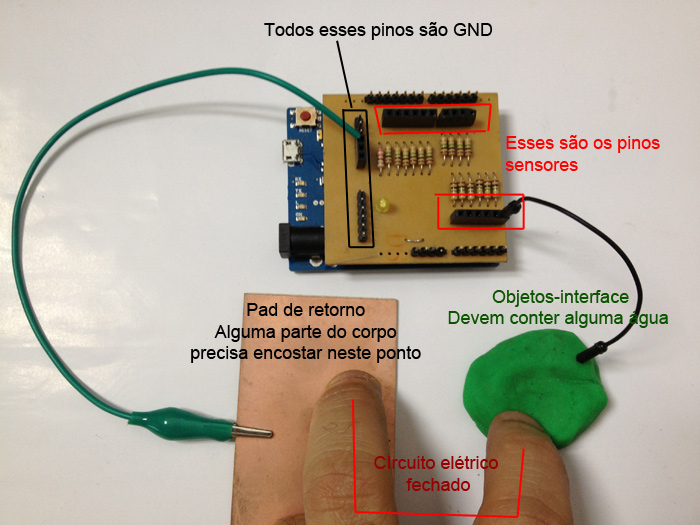
Este shield transforma qualquer objeto condutor de eletricidade em uma peça de interação com computadores. A idéia foi adaptada de um projeto livre chamado MaKey MaKey, desenhado por dois gênios do Instituto de Tecnologia de Massachuset (MIT). Confira aqui quem são os loucos! O shield que desenvolvemos implementa 16 divisores de tensão, onde um dos resistores tem um alto valor (1.000.000 ohms) e o outro resistor é composto pelo objeto a ser tocado + uma pessoa. Veja no esquema que montamos: O programa na placa Arduino realiza a leitura do pino digital, e caso uma resistência menor que 1 Mega Ohm esteja conectada nos pontos indicados, a leitura é nivel baixo. Então o programa realiza as leituras, aplica um filtro contra ruídos e disponibiliza a informação através de variáveis que podem ser enviadas pela porta serial para o computador. Caso você possua uma placa Arduíno Leonardo, você pode subir o programa original da placa MaKey MaKey, onde você pode configurar cada pino com uma ação de um dispositivo USB, como teclado e mouse. Para o caso de uso de uma Arduíno Uno, ou outra que não seja a Leonardo, portamos o código original e apontamos nos comentários como utilizar os dados através da porta serial Esse shield é resultado direto da residência de 3 meses de pesquisa no hackspace do SESC Sorocaba. Agradecemos o Fabrício Masutti e o Maurício Perez pelas dicas e orientação do trabalho. Confira abaixo os materiais que disponibilizamos para que todos possam construir o seu shield MaQue MaQue!! Diagrama de uso: Baixe abaixo o Material para construção do shield: Lista de componentesSoftware MaKey MaKey adaptado para Arduíno UNODesenhos do esquema e do leiaute da placa de circuito impressoArquivos CAD formato Eagle PCBSlides da montagem MakeyMakey em propoboard
Certa vez estava pesquisando na internet sobre assuntos variados e acabei por acaso conhecendo a robótica B.E.A.M. Interessei-me imediatamente pelo assunto. A robótica B.E.A.M. é um conceito sobre construção de pequenos robôs que tenta copiar a estética e o comportamento de organismos naturais usando poucos componentes, geralmente analógicos, que atribuem ao robô um comportamento baseado em flutuações do caos, com resultado incrivelmente "vivo". Existem muitos tipos de BEAMs, classificados por tipos, ou por classe de comportamento. Existem muito material na internet sobre esse assunto, é só pesquisar por "BEAM robotics" ou "Robótica BEAM" para saber mais. Neste artigo vamos aprender a construir um B.E.A.M clássico que chamaremos de Robô-Escova. Ele faz parte da classe de BEAMbots chamados de Squirmers, robôs que fazem alguma coisa interessante.
Sustentabilidade
Outro aspecto interessante da robótica BEAM é que devido à simplicidade dos desenhos os robôs podem ser fabricados com diversos tipos de sucata, o que confere a este tipo de trabalho um caráter sustentável, pois os praticantes da robótica BEAM têm a oportunidade de reutilizar materiais que de outra forma seriam descartados no meio ambiente.
Como funciona o robô-escova?!
O robô-escova opera um conceito muito simples. O seu corpo é feito da cabeça de uma escova de dente. O motor do seu movimento é um vibrador de celular e a sua fonte de energia é uma pilha comum.
Cabeça da escova
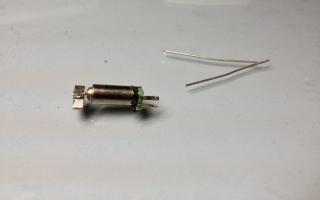
Motor de vibrador de celular
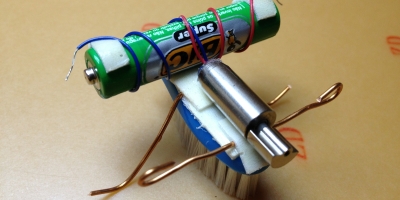
Robô escova montado, note o peso na ponta do eixo rotor.
O funcionamento é bastante simples: O motorzinho é acionado pela pilha e possui um peso acoplado ao eixo motor chamado de "volante".Normalmente os volantes devem ser balanceados para evitar vibrações. O truque que faz esse motor vibrar é o volante composto por um peso desbalanceado propositalmente, criando um eixo excêntrico.Em mecânica, excêntrico é uma peça cujo eixo de rotação não ocupa o centro, transformando um movimento de rotação contínuo, em movimento de natureza diferente.Essa "natureza diferente" pode causar um problema no mecanismo, introduzindo vibrações indesejadas. Por exemplo, uma roda de automóvel desbalanceada causa barulhos, desgastes e vibrações indesejadas que danificam o carro.No caso do nosso robô, a excentricidade é desejada, é destinada a transformar um movimento de rotação contínuo, em vibração pura.Com a rotação, o conjunto motor/eixo/peso é jogado de um lado para outro pois o peso está distribuído de maneira desigual então surge um vetor de força radial que varia com o tempo, devido à excentricidade de massa, e a coisa toda vibra. Quanto mais rápido o motor gira o eixo, maior é a força da vibração.O elemento de vibração dos celulares aproveita essa vibração, e nosso robô-escova também, transferindo-as para as cerdas da escova, que ao vibrar fazem com que o nosso robozinho "flutue" em cima da mesa. Veja que interessante o movimento semi-aleatório do brinquedo. Na próxima página você poderá acompanhar nosso tutorial de construção do robô escova.
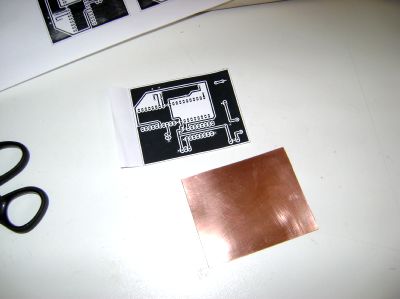
Placa de circuito impresso é uma base física para um circuito eletrônico. Através de um desenho de cobre em um dos lados da placa, os componentes do outro lado são conectados eletricamente além de ficarem presos em uma base rigida. Este artigo trata-se da construção de uma máquina que nos auxilia no processo de confecção de uma placa de circuito impresso, com técnica CAD, transferência térmica de imagens e remoção quimica do cobre.. Antes de continuar, preciso citar as páginas dos "mestres" que inspiraram a construção na minha versão da Máquina Laminador do Luciano: http://py2bbs.msxpro.com/laminador.php Laminador do Xandinho: http://www.tabajara-labs.com.br/eletronica/tts/index.htm Vamos lá. O processo todo funciona assim: 1 - O desenho do circuito é elaborado através de um programa de computador. Este programa usa inteligência artificial para "desenhar" as conexões entre os componentes, o que livra o engenheiro de um trabalho enorme. Esse desenho será transferido para a placa de cobre. Abaixo o desenho impresso e uma placa de fenolite virgem (lado cobreado) 2 - O desenho então é impresso em uma impressora LASER pois este tipo de impressão deposita um pó preto no papel, que depois é "fundido" formando a imagem. Esse mesmo pó pode ser transferido para outro material se o esquentarmos a 170 graus Celcius. Abaixo vemos o papel com o desenho virado para a face cobreada. Agora precisamos esquentar a placa para que o desenho saia do papel e passe para o cobre. 3 - Nossa máquina trabalha neste passo, transferindo o desenho do papel para a placa de cobre. A Máquina fornece pressão e calor através de dois rolos por onde a placa e o desenho passam. Desta forma, a tinta depositada no papel pela impressora LASER, é transferido para a placa de cobre.
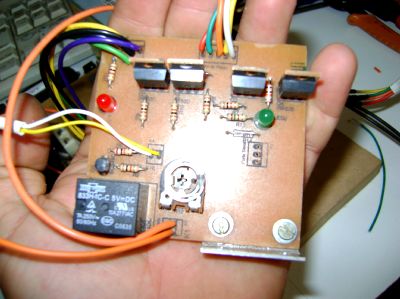
Esse artigo é dedicado à todos cadeirantes. A idéia de escrevê-lo surgiu quando um leitor do nosso site nos enviou um email comentando que possuia uma cadeira de rodas elétrica e que necessitava consertar o controlador dos motores, pois esse havia queimado.
Para quê serve uma Ponte-H?
Um motor elétrico de corrente contínua (DC) é um tipo comum de motor elétrico.
Um motor elétrico DC e os dois terminais elétricos.
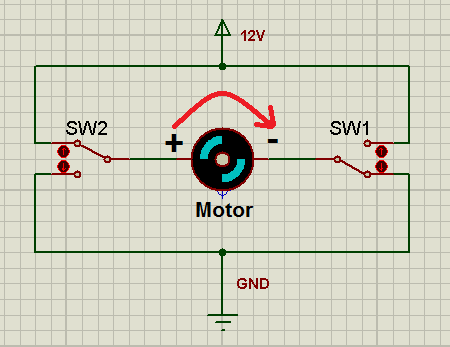
Sua principal característica é que ele possui dois terminais elétricos, um positivo e um negativo. Se uma corrente elétrica percorre no sentido normal o eixo do motor gira para um lado. Se a corrente elétrica é invertida, o eixo gira para o outro lado. Portanto, podemos inverter o sentido de rotação do eixo simplesmente invertendo a polaridade dos terminais elétricos, e por consequencia, invertendo a corrente. Abaixo vemos um exemplo desse funcionamento
Motor girando no sentido normal.
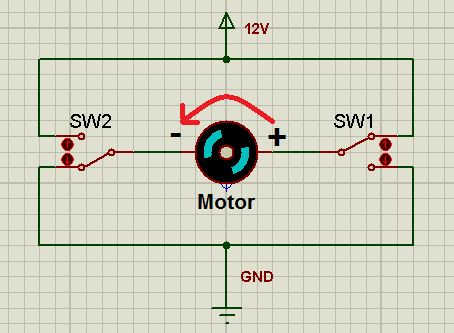
Motor girando no sentido reverso.
Controlando a polaridade com transistores
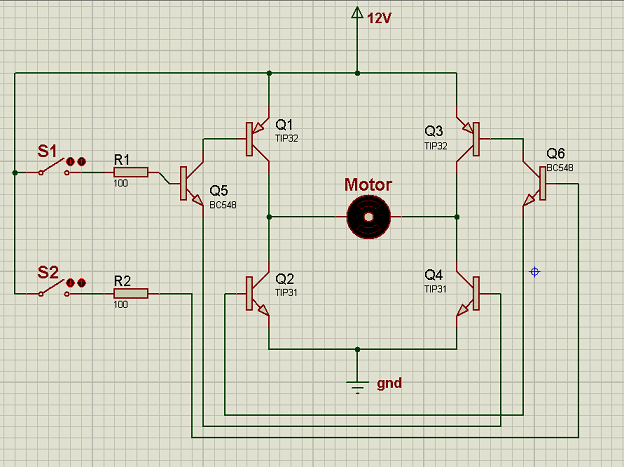
Como vimos no exemplo acima, é fácil controlar o motor usando chaves. Porém, se for necessário acionar os motores através de um painel de controle automatizado, a abordagem das chaves é inadequada. Podemos subistituir as chaves por transistores, que possuem a vantagem de manipular a corrente elétrica sem partes móveis, portanto não desgastam e não soltam faísca, fator de segurança. No circuito abaixo os transistores são acionados por botões, mas a corrente que passa por esses botões é muito pequena, portanto os fios para levar esses botões para longe do circuito podem ser finos e longos.
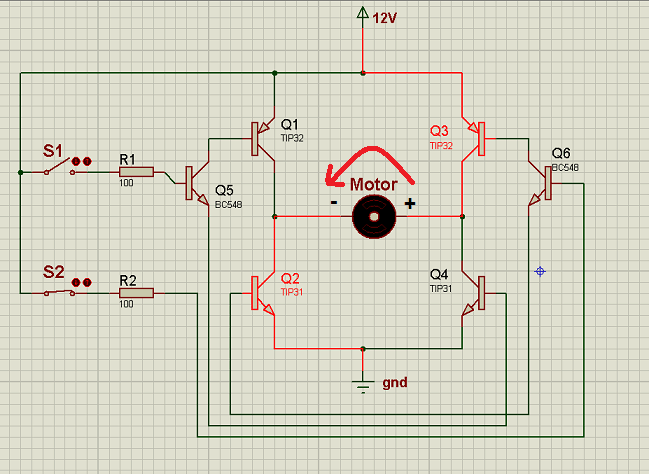
Ponte-H com transistores bipolares.
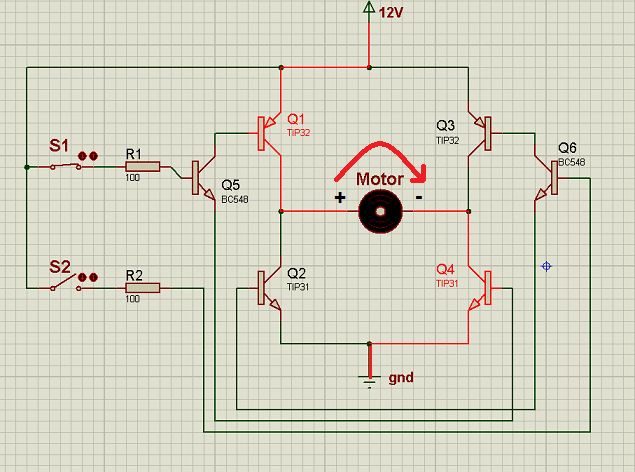
No circuito acima, os transistores Q1, Q2, Q3 e Q4 substituem as chaves do exemplo anterior. Notem que Q1 e Q3 são TIP32 (P) e Q2 e Q4 são TIP31 (N) Vejamos o funcionamento desta ponte-h transistorizada: Ao pressionar o botão S1, Q1 e Q4 são ligados e o motor gira para um lado.
S1 acionada e motor girando para um lado.
Ao pressionar S2 os transistores Q2 e Q3 são ligados e o motor gira para o outro lado.
S2 acionada e motor girando para outro lado.
Agora sabemos como funciona uma ponte-h, vamos na próxima página verificar os limites da ponte-h com transistores TIP31 e TIP32, que são transistores bipolares.